News

Learning to Coordinate with Experts
07 Mar 2025
Khanh Nguyen, Benjamin Plaut, Tu Trinh, and Mohamad Danesh introduce a fundamental coordination problem called Learning to Yield and Request Control (YRC), where the objective is to learn a strategy that determines when to act autonomously and when to seek expert assistance. They build an open-source benchmark featuring diverse domains, propose a novel validation approach, and investigate the performance of various learning methods across diverse environments, yielding insights that can guide future research.

Computational Frameworks for Human Care
20 Feb 2025
Brian Christian, CHAI Affiliate, has published an article titled “Computational Frameworks for Human Care” in the most recent issue of Daedalus, the journal of the American Academy of Arts and Sciences. In it, Christian traces how AI alignment has progressed from simple reward mechanisms toward care-like relationships, revealing both the potential and limitations of machine caregiving while deepening our understanding of human care itself. The issue is titled “The Social Science of Caregiving” and was co-edited by CHAI Affiliate Alison Gopnik.

A Practical Definition of Political Neutrality for AI
04 Feb 2025
NEW: Our current research project to build political neutrality evaluations.

RvS: What is Essential for Offline RL via Supervised Learning?
18 Jan 2025
Scott Emmons, PhD student, was an author on “RvS: What is Essential for Offline RL via Supervised Learning?”
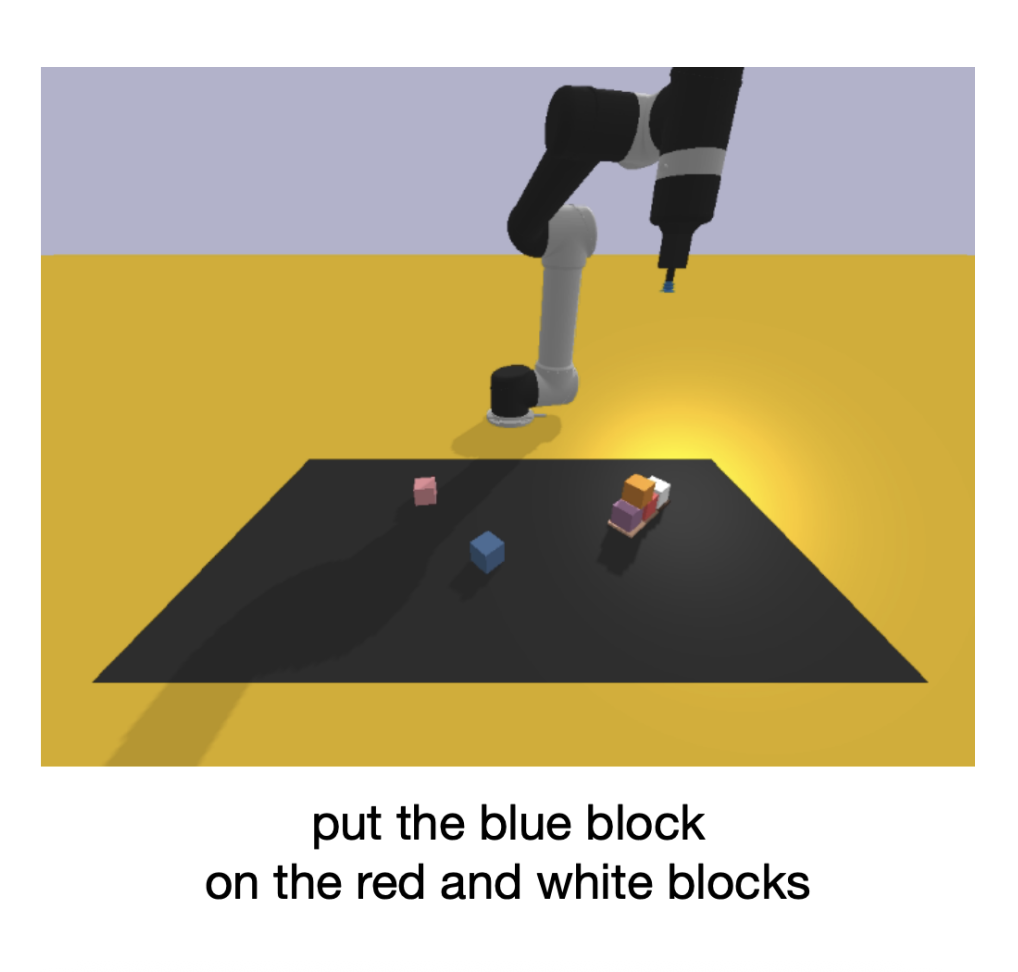
Getting By Goal Misgeneralization With a Little Help From a Mentor
25 Dec 2024
“Tu Trinh, Ben Plaut, Khanh Nguyen, and Mohamad Danesh wrote the paper, “Getting By Goal Misgeneralization With a Little Help From a Mentor.” This paper explores whether goal misgeneralization can be mitigated by allowing an agent to ask for help when it is uncertain. The answer is mostly yes, although our current methods have substantial weaknesses and there are lots of interesting avenues for future work.”Tu Trinh, Ben Plaut, Khanh Nguyen, and Mohamad Danesh wrote the paper, This paper explores whether goal misgeneralization can be mitigated by allowing an agent to ask for help when it is uncertain. The answer is mostly yes, although our current methods have substantial weaknesses and there are lots of interesting avenues for future work.
Linear Probe Penalties Reduce LLM Sycophancy
14 Dec 2024
Visiting ETH MsC student Henry Papadatos and supervising CHAI PhD student Rachel Freedman publish an article “Linear Probe Penalties Reduce LLM Sycophancy” at the NeurIPS SoLaR workshop. The paper demonstrates a generalizable methodology for reducing unwanted LLM behaviors that are not sufficiently disincentivized by RLHF fine-tuning

Rachel Freedman selected as inaugural Cooperative AI Fellow
30 Nov 2024
Rachel Freedman, PhD Student, has been selected as one of the fellows for Cooperative AI’s PhD Fellow Program.
Representative Social Choice: From Learning Theory to AI Alignment
12 Nov 2024
Tianyi Qiu, CHAI Intern, wrote this paper which was accepted by NeurIPS 2024 Pluralistic Alignment Workshop. Here is the link to the paper.
Getting By Goal Misgeneralization With a Little Help From a Mentor
10 Oct 2024
Khanh Nguyen, Mohamad Danesh, Ben Plaut, and Alina Trinh wrote this paper which was presented at Towards Safe & Trustworthy Agents Workshop at NeurIPS 2024.
Language-Guided World Models: A Model-Based Approach to AI Control
18 Sep 2024
Khanh Nguyen, CHAI Postdoctoral Fellow, published a paper at the Fourth International Combined Workshop on Spatial Language Understanding and Grounded Communication for Robotics (ACL 2024).